5.1 DGPS
Learning Objectives
On the successful completion of this chapter you should be able to:
- explain what a differential technique is
- explain what the different methods of DGPS are
- explain the difference between real time and post processed corrections
- explain the difference between DGPS and point positioning
- explain the errors associated with DGPS and how to minimise them
- debate the need for, and explain what constitutes redundant or check observations with DGPS.
In the beginning…
Not satisfied with one GPS receiver, some surveyor somewhere figured out that using two receivers could help cancel out some of the errors that impact point positioning.
Enter differential GNSS, which has stubbornly hung onto the name differential GPS or DGPS in the majority of cases.
DGPS uses two GNSS receivers using code observable to reduce the errors that impact point positioning, and can be used in real time, or the correction process can be saved for later when back in the office.
If one GNSS receiver is good, two MUST be better right?!
Note: There are other differential techniques, like RTK, that rely on the carrier phase component of the GNSS signal. These are not covered in this module, they are covered in Chapter 6.
DGPS
Point positioning provides a quick and cheap method for getting autonomous positions, however, the errors that limit its accuracy, limit its applications outside of navigation.
Unless you have more than one GNSS receiver.
Differential GPS, most commonly known as DGPS, is a technique that uses code observable to make point positioning more accurate, by using two GNSS receivers in different locations. DGPS has a variety of applications in asset management, basic data collection and improved navigation.
DGPS utilises two GNSS receivers in different locations, but same area, to model errors and apply corrections to observations. One receiver is set up over a mark (usually a permanent survey mark) that has a known coordinate – this receiver is called the base station, as it stays in place for the entire time observations are being undertaken by the second receiver. The second receiver is called the rover, as it is moving around taking the GNSS observations.
By observing a point of known coordinates with a base station, we are able to determine the difference between the known coordinates and the collected coordinates. Essentially a base station tells us the difference between where a point position says it is, and where it knows it is. This difference is then used as a basic model of the errors for that area, and this model can be applied as corrections to the data collected by other GNSS receivers in the same area at the same time.
The errors that impact an area aren’t random, and can generally be modelled as relatively smooth movements over time. Any time a GNSS receiver is collecting positioning data, it is creating a position and a time record for a point, and by matching the time of a correction to a rover measurement, we can apply the right correction to the point collected by the rover.
There are two methods of applying DGPS corrections, the first is by using coordinates, and the second (and more accurate) method is by using pseudo range corrections.
Coordinate corrections
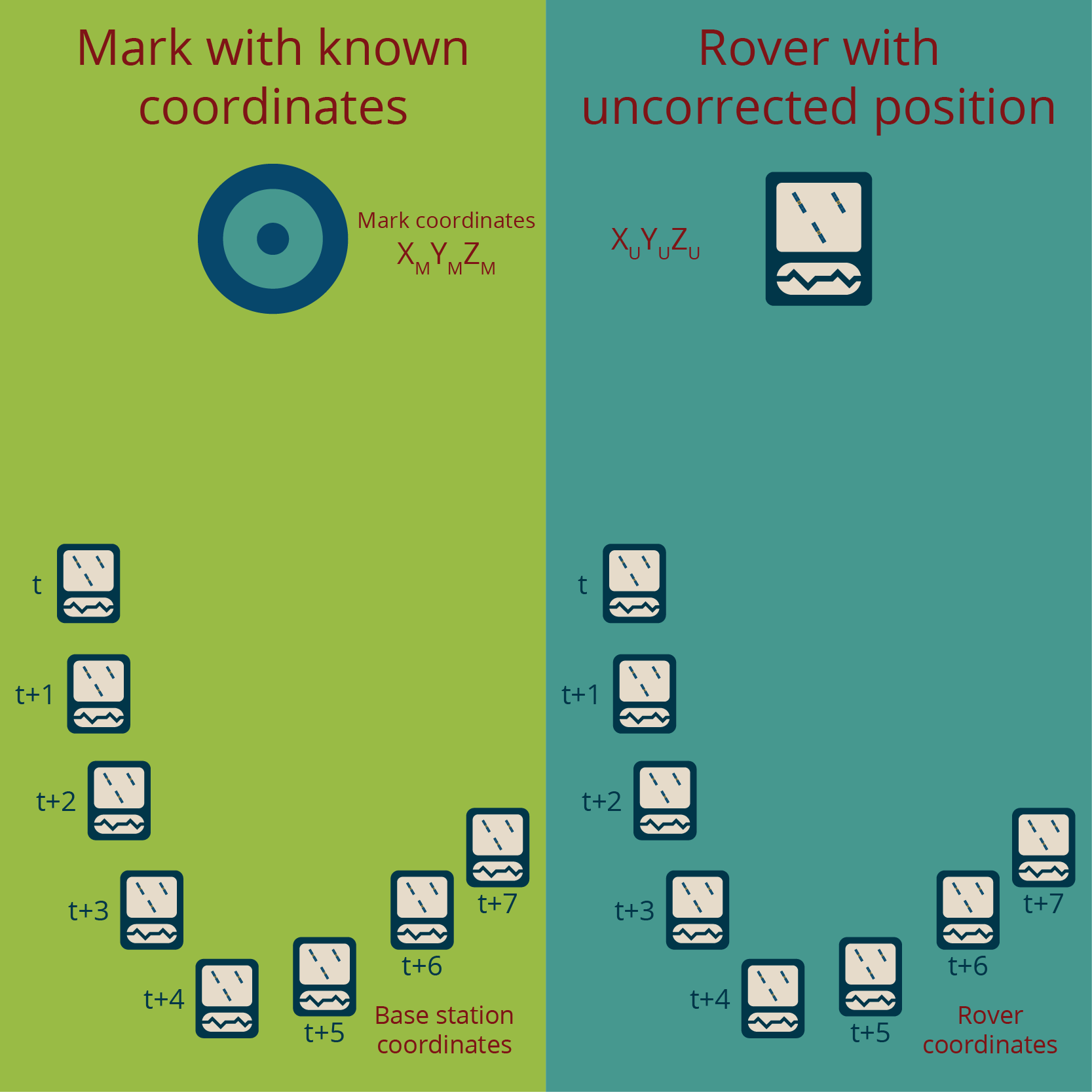
In Figure 5.1(a), we have a DGPS set up, where a base station is set up on a mark with known coordinates, and a rover is placed on a point. At time , the base station is logging a position away from the known coordinates, and it continues to log a position every second after the initial position ( etc.). At the same time, the rover receiver is logging positions every second as well.
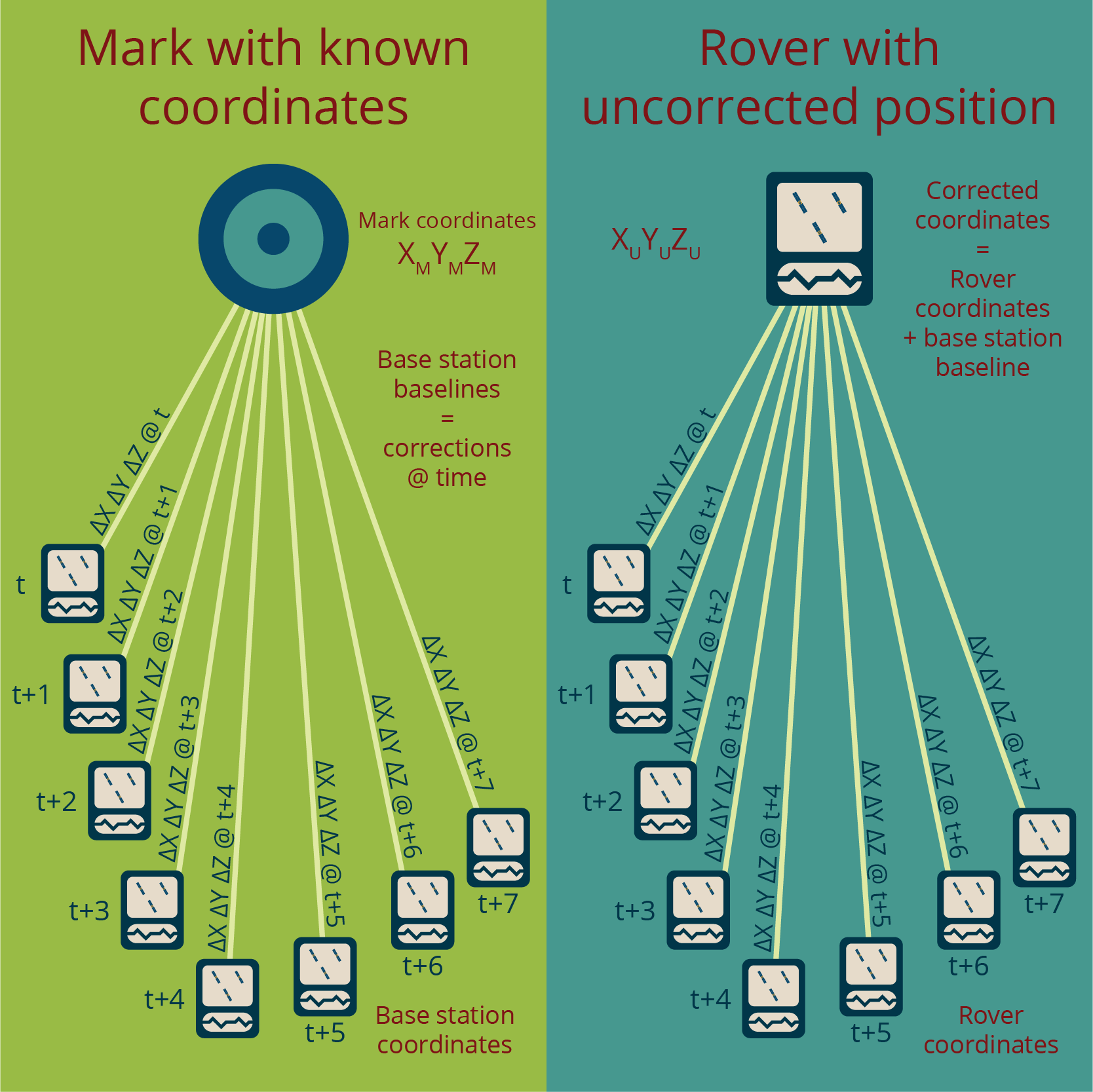
In Figure 5.1(b), the differences between the known coordinates of the mark and the logged position at the various points in time are represented by the baselines . These base station baselines are the corrections that are then applied to the rover data to calculate its corrected position. This situation assumes that the rover is experiencing the same errors as the base station.
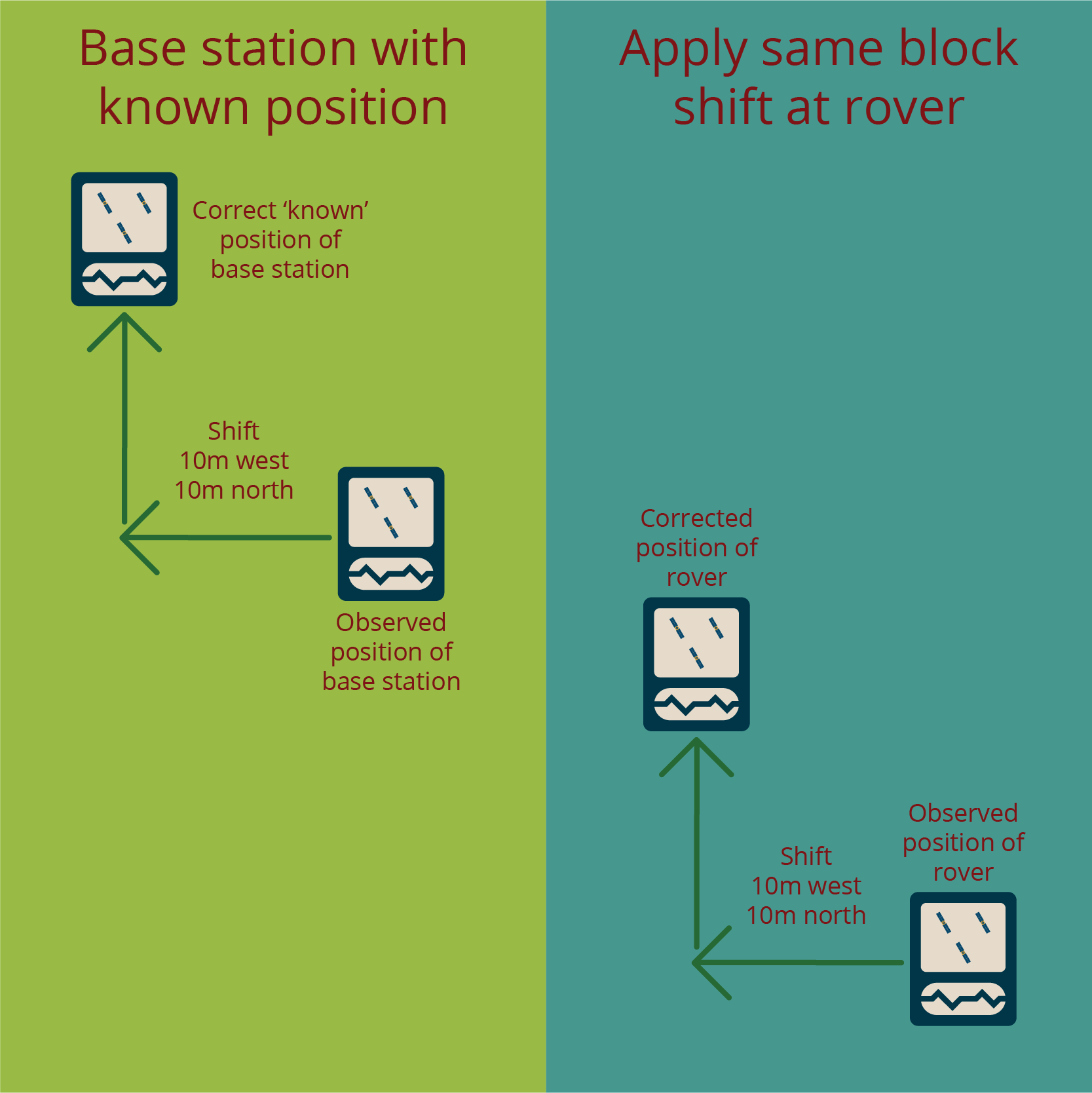
The simplest method of applying corrections to coordinates in DGPS is by using a translation or block shift method, where all coordinates are moved in the same direction, the same amount. This is shown in Figure 5.1(c).
For corrections from a base to be applicable to another GNSS receiver’s data, each receiver must be tracking a common set of satellites, meaning they need to be in relatively close proximity to each other, with sites that allow for good satellite visibility by the GNSS receivers.
Pseudo range corrections
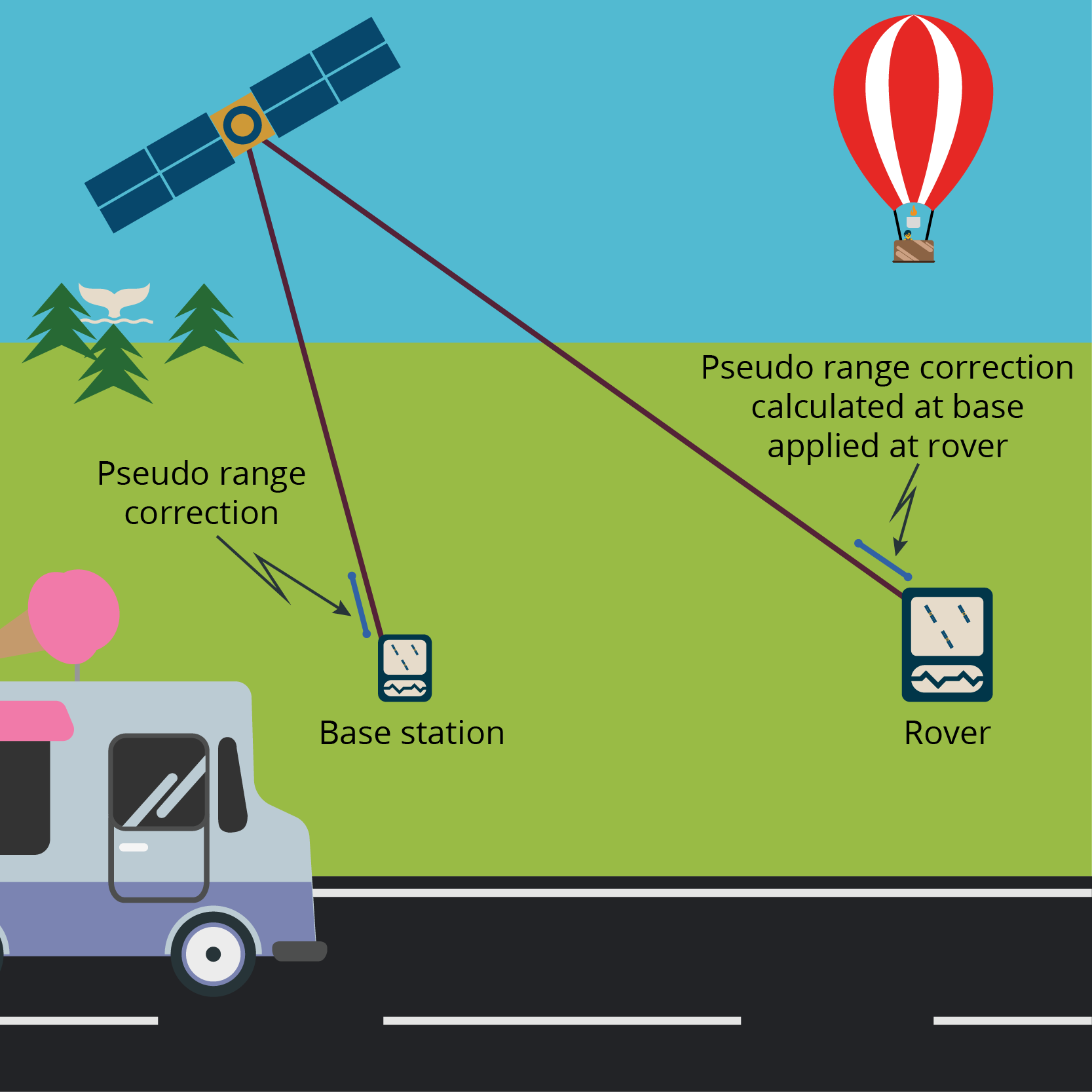
In the pseudo range correction method of DGPS, the base station doesn’t use the normal point positioning technique of using time to determine range. The base station already knowns exactly where it is, and where the satellites are meant to be, so it knows the ranges already, and uses this to determine the times. It compares this calculated time to the time the signals actually took, minus any error or delay in the satellite’s signal.
This error correction is then transmitted to other receivers in the area, and they can use the error correction message to correct their position pseudo ranges and positioning solutions, as shown in Figure 5.1(d). Because the distance between the receivers is tiny compared to the distances to the satellites, errors measured by the base station will be almost exactly the same for the other receivers in the area.
The pseudo range correction method is the more common method of DGPS.
Base station requirements
The following are requirements for the base station for the DGPS technique to be utilised:
- The base station must record data during the same time period as the rover is recording data. It should be set up to start recording data prior to the rover commencing measurements, with enough time for point positioning point averaging to resolve any localised errors.
- The logging interval (epoch) of the base station must match the rover epoch.
- The known coordinates of the base station must be accurate and reliable.
- The base station must be carefully centred over the ground mark and the height of the antenna must be accurately measured and recorded.
- The base station must have a clear, unobstructed view of the sky as it must track the same satellites that the rover tracks.
- The distance between the base station and the rover should not be excessive.
- Any elevation mask set at the base station must be less (lower) than the elevation mask of the rover.
