3.5 Errors in GNSS
The types of errors in GNSS will be discussed in more detail in Modules 4-6 when discussing specific observation techniques, however, it is important to have an overview of the different errors that do happen in GNSS with respect to the fundamentals learnt in Modules 1, 2 and 3. An understanding of these errors is also important in understanding the different kinds of GNSS measurement techniques available, as each attempts to make corrections for different types of errors, leading to different levels of accuracy.
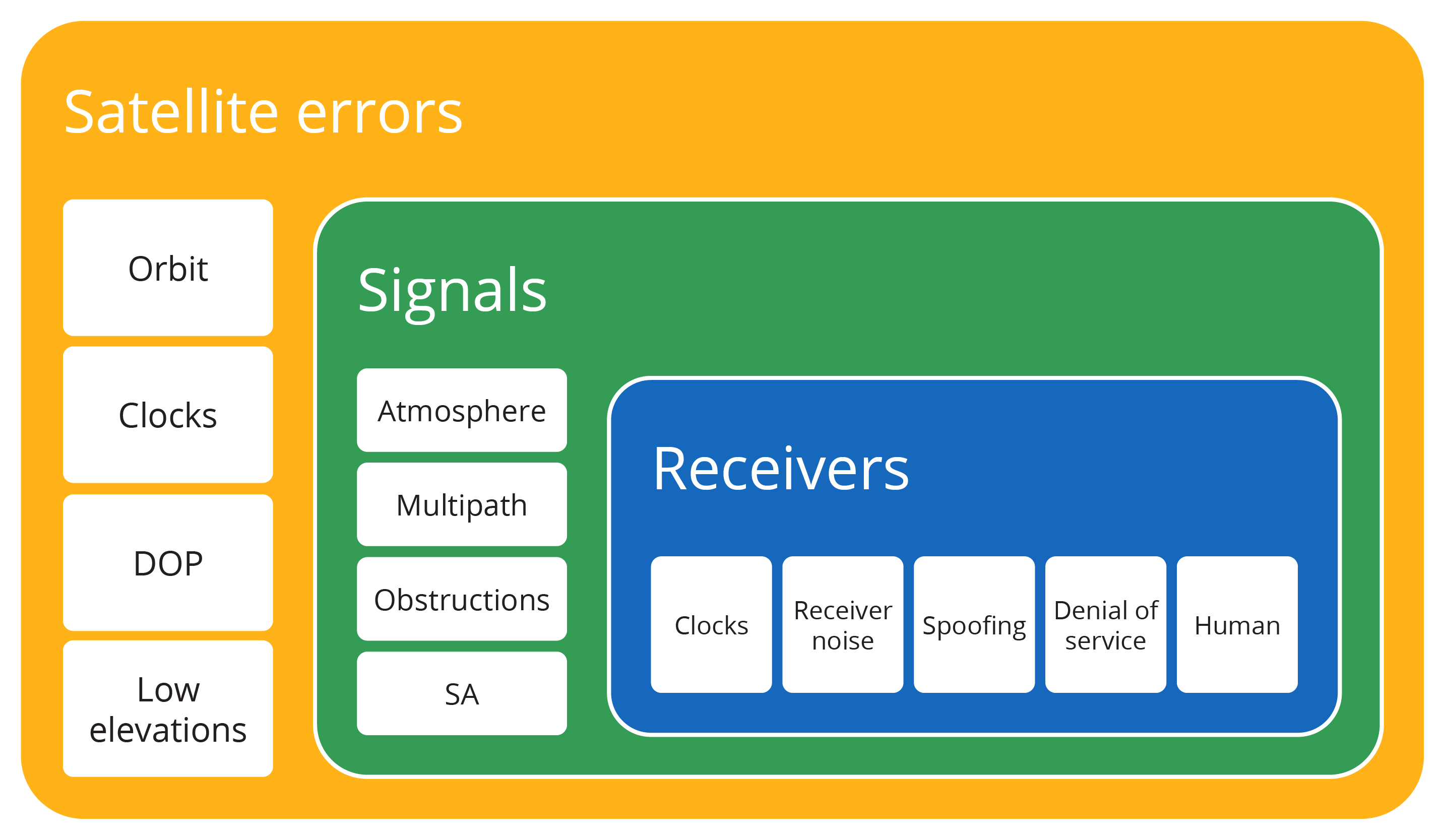
Errors in GNSS, as shown in Figure 3.5(a), can be grouped into three main categories: satellite, signal and receiver errors. Some errors are combinations of more than one area, however, they have been listed in the one that is the primary influence. Human error is listed with receivers, however, the capacity for us to cause errors in GNSS data extends far beyond using a receiver incorrectly or poorly!
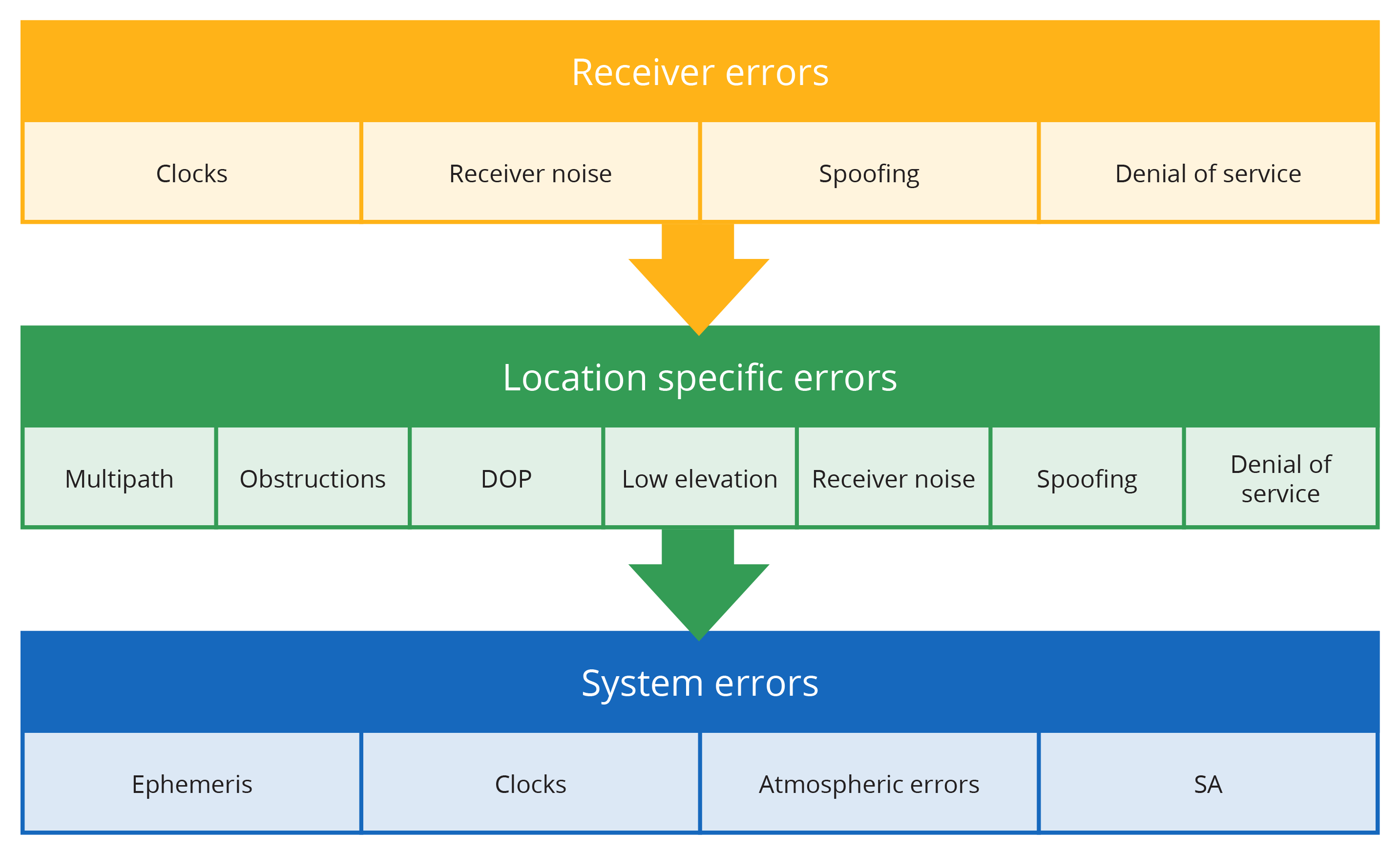
Some errors are specific/unique to a particular site or to a particular receiver, and these errors are classified as location and receiver errors respectively. The other kinds of errors are common to all GNSS receivers in the same area, and are referred to as system wide errors. Figure 3.5(b) outlines how the errors above fall into each category.
Satellite errors
Orbit errors
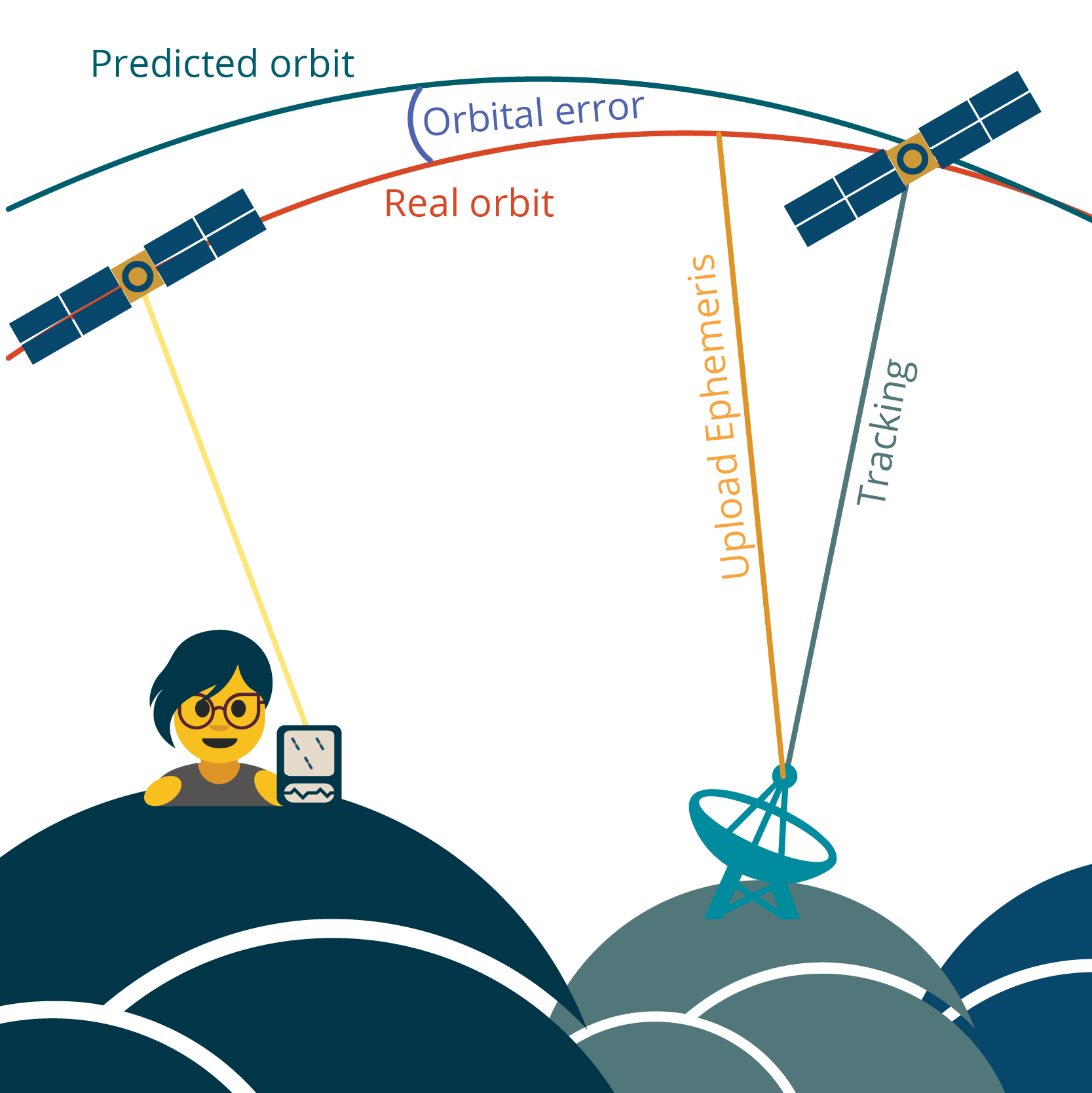
As discussed in previous sections of this chapter, the orbital parameters of a satellite need to be constantly monitored and updated by the control segment due to orbit error, as shown in Figure 3.5(c). This means that positions calculated using broadcast ephemerides will be less accurate than those calculated using final ephemerides.
Some GNSS surveying techniques require the final ephemerides to be used to guarantee the best solution for a position. Usually these surveys have observations of longer than an hour on multiple permanent marks.
Satellite clock errors
As previously mentioned, the different global systems use different types of atomic clocks, and most satellites will have multiple types of clocks on board. Rubidium and Caesium are standard on GPS SVs, Galileo has Hydrogen maser and Rubidium.
These clocks are incredibly accurate, but they aren’t perfect, and experience ‘drift’. This means they lose or gain one nanosecond for every three hours of time.
The drift of atomic clocks is well documented and understood in GNSS, so adjustments are regularly made by the control segment, and these corrections are included in the navigation data message broadcast by each satellite.
Dilution of precision
Note: While DOP is not technically solely a satellite error (it is more correctly an error relating to satellite geometry and the measurements taken to satellites), it is included in this category for completeness.
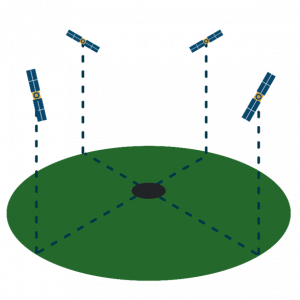
In the early day of GPS, there were limited numbers of satellites, so the minimum standard for an ideal satellite configuration was determined – four satellites spaced evenly at 90 degree intervals around the horizon, at 45 degree elevation. Any variation from this configuration can be calculated, and is known as dilution of precision, more commonly referred to as DOP.
DOP can vary in value from 1 (good) to infinity (very bad), where anything below four is generally consider sufficient for collecting GNSS positions. There are several variations of DOP:
- PDOP – Position dilution of precision. This is still the most commonly used DOP value
- HDOP – Horizontal dilution of precision
- VDOP – Vertical dilution of precision
The use of DOP values is largely redundant since the addition of satellite constellations beyond GPS, but many receivers that only track GPS SVs will continue to calculate and record PDOP values.
Low elevations
Once satellites become low on the horizon, it is more likely that their signals will suffer from atmospheric errors and multipath (see the next section for these errors), and thus it is better if these satellites are not included in our measurements.
To prevent the signals from these satellites being included in measurements, GNSS receivers have a function called an elevation mask which prevents the low elevation satellites from being included once they get below a certain angle to the horizon. The elevation mask angle can be adjusted depending on project requirements.
Signal errors
Atmospheric errors
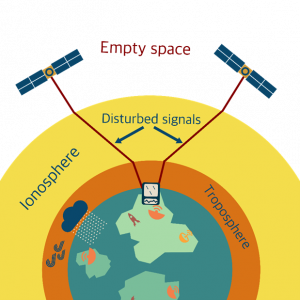
Radio waves behave in similar ways to light waves, and when they pass through the different layers of the atmosphere they are bent, or refracted, from their original path. This causes delays in the GNSS signal reaching the receiver, and thus a positioning error, as shown in Figure 3.5(e). Atmospheric delays are the largest during the heat of the day, and during sunspot activity or solar flares.
The troposphere is approximately 50km ‘thick’ and is the layer of the atmosphere that contains water vapour, and is where our local weather is generated. Generally, each receiver will have a troposphere model that is able to correct for this error.
The ionosphere sits above the troposphere, and is about 200km ‘thick’. It contains charged particles, called ions, and the level of activity of the ions impacts GNSS signals.
Over shorter distances and areas, atmospheric delays can generally be corrected, however, when using particular techniques of GNSS data collection that use multiple GNSS receivers over longer distances, the atmospheric errors may need to be modelled at more sophisticated levels. Modelling the troposphere is usually reasonably simple, however, the ionosphere is highly variable and more difficult to model. Using dual frequency GNSS receivers; ones that can process two GNSS signals at a time, is beneficial in reducing atmospheric errors.
Multipath

Multipath occurs when the signal doesn’t make it directly to the GNSS receiver, but is reflected off other surfaces first, as shown in Figure 3.5(f). This could be buildings, trees, vehicles or something else nearby the receiver. Similar to the issues of the signal being influenced by the atmosphere, the issue with multipath is the delay in the signal reaching the receiver, and the positioning error this causes due to the time delay.
Multipath is increasingly being dealt with by the signals processing technology in the GNSS receiver’s antenna, however, situations where multipath could be generated should be avoided where possible.
Obstructions
Radio waves are blocked by physical obstructions such as mountains, buildings or even vegetation. This prevents the GNSS signals making it to the receiver, or if they do, it is likely they have experienced some level of multipath.
Selective Availability
Selective availability (SA) was an intentional degradation of the GPS signals by the US military to prevent hostile forces using GPS for positioning. With SA turned on, the horizontal accuracy of measurements was about 100m, while vertical was +/- 200m. Once it was turned off in early 2000, horizontal and vertical accuracy was approximately +/- 20m.
The US has committed to not including SA capacity on its future generations of satellites, however, the possibility of it happening again can’t be discounted as GPS is a military system.
Receiver errors
Receiver clock errors
While satellites have expensive and very accurate atomic clocks, it would be impractical (and too expensive!) to equip each GNSS receiver with an atomic clock. GNSS receivers have an inexpensive, good quality quartz clock that has a drift of about 1 000 nanoseconds every second.
While using quartz clocks in receivers could seem to be an issue, receivers are able to adjust their time using the GPS system time when they are receiving data from satellites.
Receiver noise
All GNSS receivers are subject to other radio waves that occur naturally or through other processes. These other radio waves, along with other types of electrical interference are what is known as background noise, and impact the ability of the receiver to ‘hear’ the GNSS signals.
This is best understood through an example.
Imagine if you’re having a conversation with a friend, and then someone starts blasting music out of a speaker at twice the volume that you’re speaking. You can no longer hear your friend talking (the signal), because the strength of the noise coming out of the speaker (the background noise) is now greater than your friend’s voice.
This imbalance of the signal to the background noise is called the signal to noise ratio (SNR) and for GNSS is the strength of the GNSS signal to the background noise. If the SNR is large (generally greater than 10), the signal is strong compared to the background noise. If the SNR for a GNSS receiver drops below 6, this would usually generate an error and stop the receiver collecting that signal.
Spoofing
GNSS signal spoofing is when a false GNSS signal is sent to a GNSS receiver to make it think it is somewhere different to where it is. While spoofing is illegal in most countries, it is still prevalent in some parts of the world. GPS L1 is the signal most likely to be spoofed, and spoofed data can usually be detected at close inspection – often the almanac and other typical GNSS signal characteristics are missing. Most new GNSS signals are being designed to prevent spoofing attacks.
Denial of service
Most commonly called jamming, denial of service is when a GNSS receiver is prevented from receiving GNSS signals through intended interference.
Human error
The greatest potential source of error in any GNSS observations are humans. We might measure the wrong point, use the wrong datum, write coordinates down incorrectly, observe for too short of a time or some other error in our process. To combat this we use multiple systems of checks in our processes, as well as building in measurement redundancy to our work.
